Course Overview
The aims of this module are to:
- Introduce feedback systems and the concepts of block diagrams and transfer functions and different types of controllers
- Introduce the concept of stability and performance criteria of feedback systems
- Explain the concept of root locus and its application to classical control design
- Introduce frequency response and Bode diagrams-based analysis and design techniques
Having successfully completed the module, you will be able to:
- determine the step transient response of a system
- determine the frequency response of a system
Types of Control system
Open loop control
- No feedback, only operator input
Closed loop control
- Feedback control system automates optimization
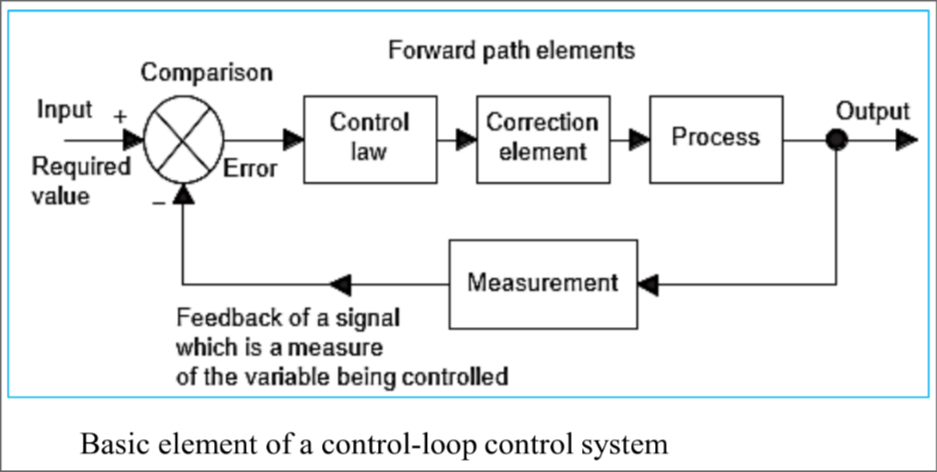
Feedback control system
Regulator system
- Maintain constant output
- Input is seldom changed

Follow-up system
- set point frequently changed
Application of Control Theory
Dynamic Analysis
Determination of response of a plant to commands, disturbances and changes in plant parameter
Control System Design
If dynamic analysis is unsatisfactory and modification of plant is unacceptable, design phase in necessary to select control elements needed to improve dynamic performance to acceptable level
Method of Analysis
- Consider system performance in time domain by measuring output response for given input
- Frequency domain - output response to sinusoidal input is considered in steady state only if transient is allowed to subside before measurement ends
Requirement of Control Theory
- Stability
- Accuracy - in terms of errors
- Error - steady state - due to static friction as output ceases to move
- Error - can reverse sign, overshoot due to energy
- Speed of response
Stability and accuracy are incompatible
A good design is a compromise of both
Systems Classification
Stationary vs Non-stationary System
Non stationary
- differential / difference eq have one or more coefficients as functions of time
Stationary
- differential / difference eq only have constant coefficient
Linear vs non linear systems
Linear - Solution linearly related to inputs
Non-Linear - contain nonlinear terms (e.g. quadratic)
Lumped parameter vs Distributed parameter
Lumped parameter - ordinary differential equations
Distributed parameter - partial differential equations
E.g:
| bodies | rigid | elastic |
|---|---|---|
| spring | massless | have distributed mass |
| electrical leads | resistanceless | distributed resistance |
Continuous vs Discrete variable system
| all system variables are continuous function of time | has one or more variable known only at a particular instant of time |
|---|---|
| describing equations are differential equations | equations are difference equations |
| e.g. time interval controlled sampled data system |
Laplace transforms
Let F(s) be the Laplace transform of f(t),
Where,
Then,
Shift theorum
- In automatic control systems, it is known as dead time
- In the process industry, it is known as transport lag
Convolution theorum
- The convolution theorum is the product of 2 Laplace transforms to form the Laplace transform of the convolution integral
- is known as the dummy time variable
Final Value Theorum (for this course)
Useful in determining steady state accuracy
Initial Value Theorum
Useful in Inverse transform when initial condition is known to be zero
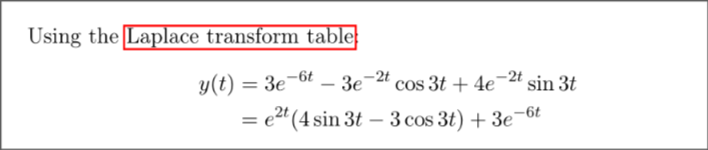
Laplace transform table
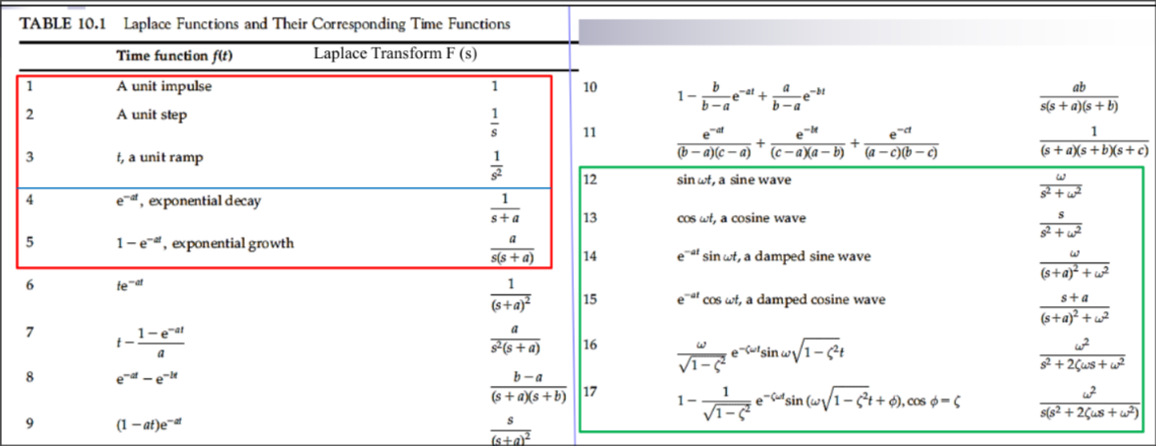
- Those in the boxes will be used
- Those in the green box is provided in the final exam
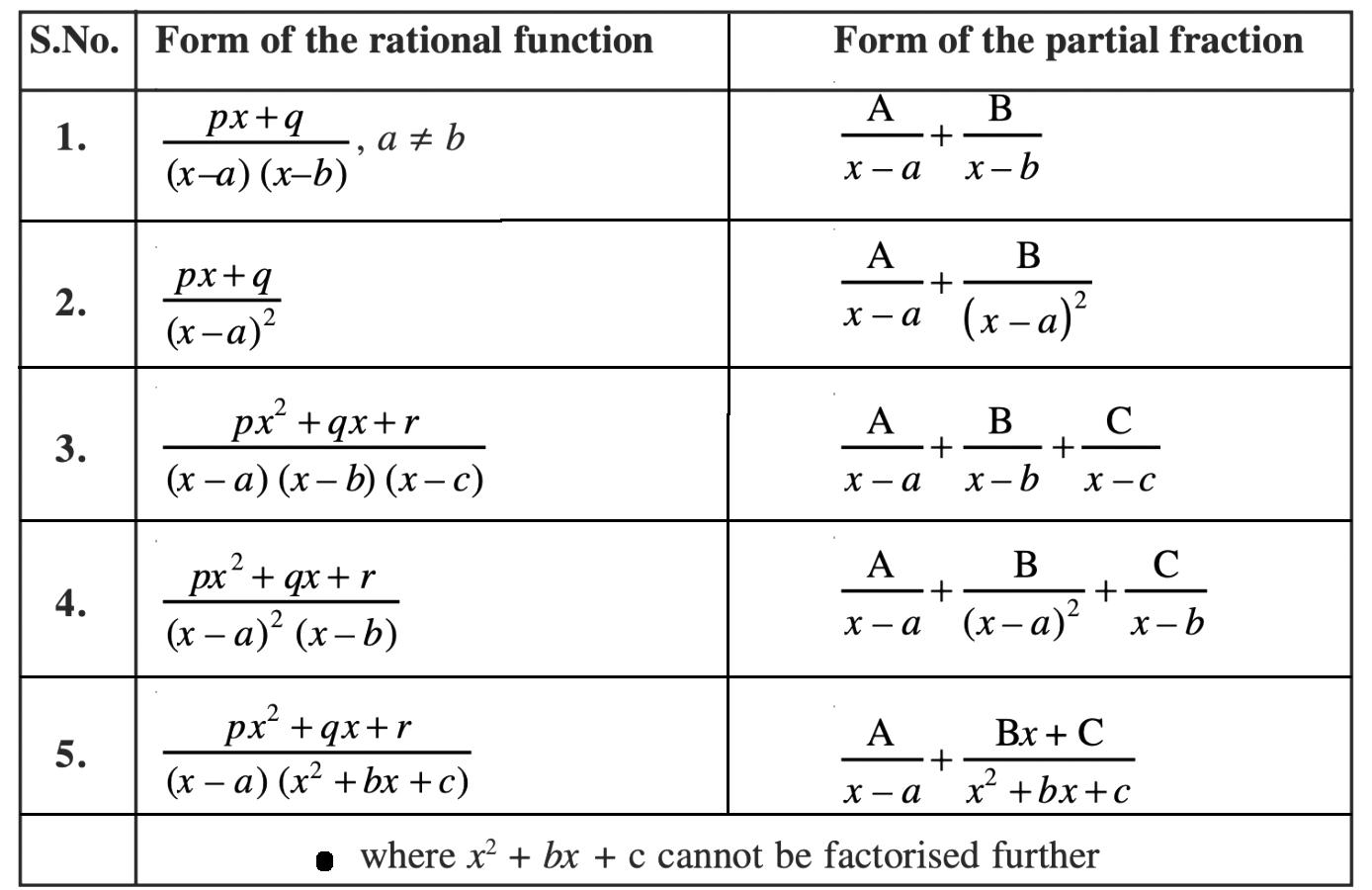
Expand for partial fraction recap!
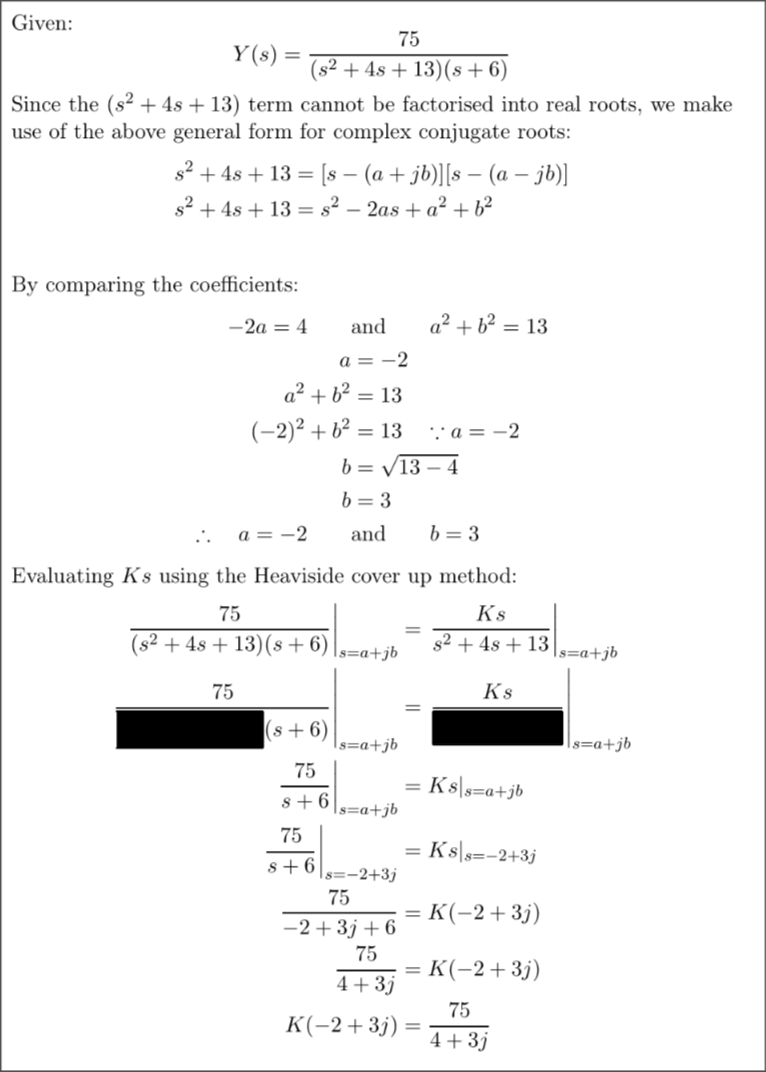
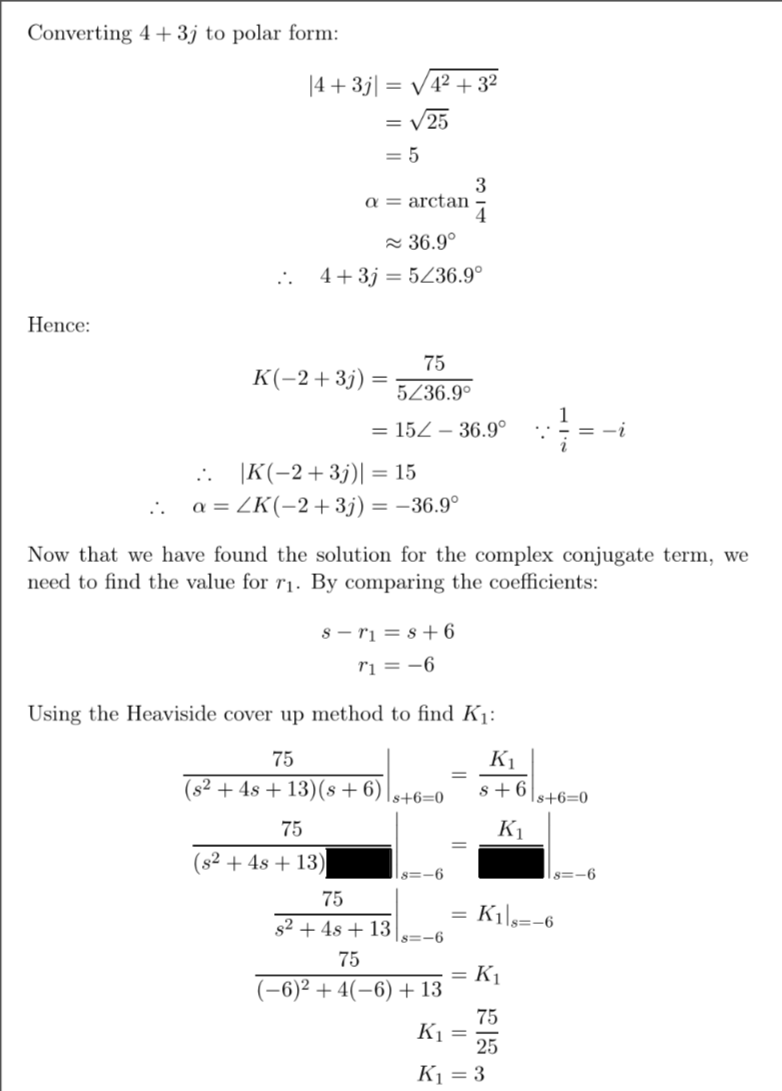
Inverse Laplace Transform for complex conjugate roots
Given a Laplace transform as a fraction:
Where:
- , and are constants
- are the complex conjugate roots
- is the remaining root
The general form of the inverse transformation for the above Laplace transformation with complex conjugate roots is:
Where:
- is the angle from the polar form of
The response term is just the general form without the term:
Where:
Expand this for examples!
Method 1
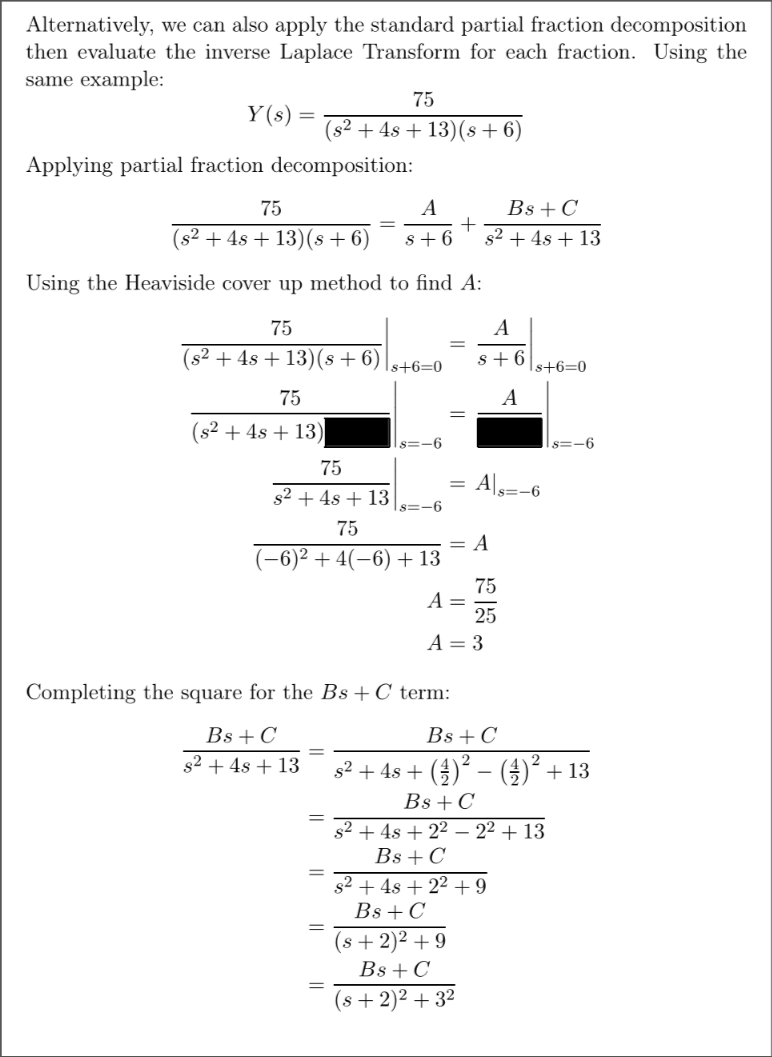
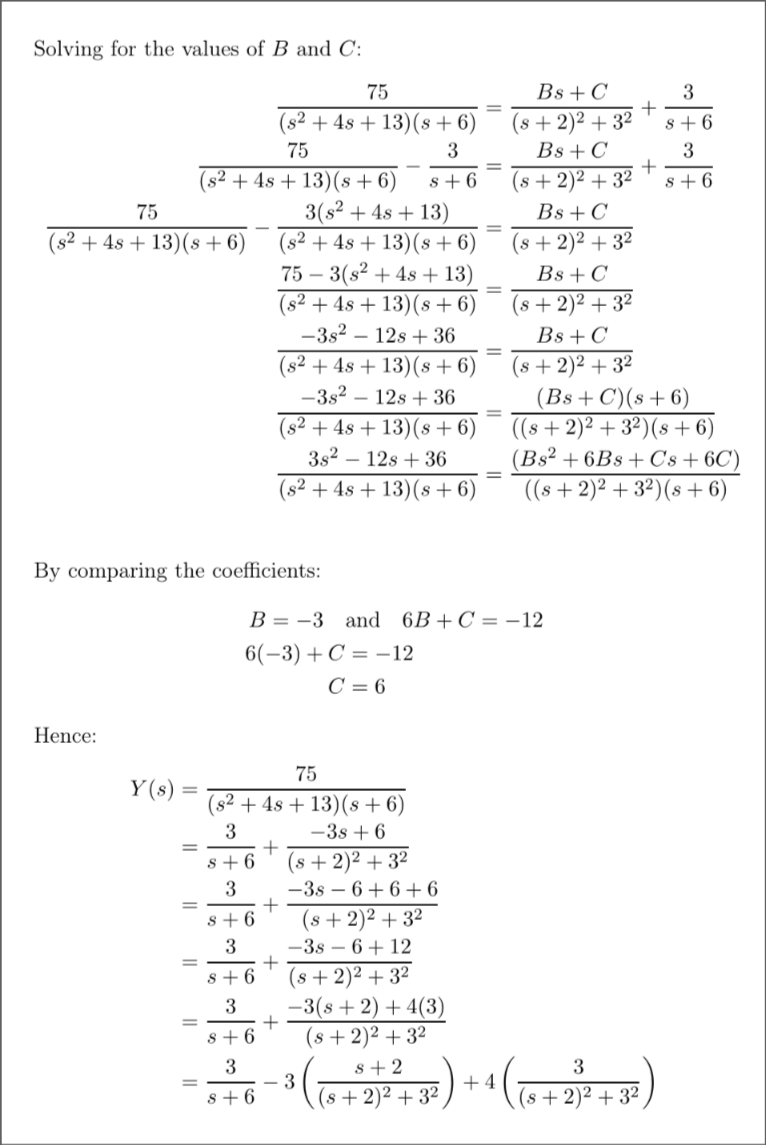
Method 2
Percentage Overshoot
Spring damper system
sorry i got lazy here, here’s a screenshot
