Introduction to AI
Views of AI
- Thinking Humanly: Cognitive Modeling
- How do humans think? Main field of neuroscience
- Thinking Rationally: “Law of Thought”
- Logic research - Reasoning based on logic
- Acting Humanly: Turing test
- To test in anonymity if a human can distinguish a machine from a human
- Acting Rationally: Rational agents
- Doing the right thing - Maximise goal achievement give available information
- Main goal of this course
Complex Interactions for AI
- Stochastic, open environment - random and unpredictable
- Multiple players
- Sequential Decision, online
- Strategic (selfish) behavior
- Distributed Optimisation
Intelligent Agents
All systems / machines etc can be treated as an agent
What is an Agent?
Entity that can: Perceive through sensors - Act through effectors
Rational Agents
Rational action: action that maximises the expected value of an objective performance measure given the percept sequence to date
Rationality depends on:
• performance measure
• everything that the agent has perceived so far
• built-in knowledge about the environment
• actions that can be performed
Autonomous Agent
Adapt to the environment through experience rather than built in knowledge
Simple Reflex Agents:
- Identify rule that relates to situation
- Execute associated action Now with STATE:
- Addition: Now dependent on both situation AND stored internal state Goal-based Agents:
- Addition; Actions will continue to be performed until goals are reached Utility-based Agents:
- Addition: How happy will agent be if it attains a certain state → utility
Type of Environment
Accessible: Sensory apparatus give access to complete environmental state Deterministic: Next state is purely determined by current state and actions of agent Episodic (vs Sequential): Each episode is not affected by previous taken actions Static: Environment does not change while agent is deliberating Discrete: Limited number of distinct perceptions and actions
Design of Problem-Solving Agent
Systematically consider the expected outcome of different possible sequences of actions that lead to states of known values - Choose the best one
STEPS:
- Goal formulation
- Problem formulation
- Search process
- No knowledge → uninformed search
- Knowledge → Informed search
- Action execution (based on recommended route)
Well-Defined Formulation
Definition of problem: Information used by agent to decide what to do Specification:
- Initial state
- Action set (available actions / successor functions)
- State space (states reachable from initial)
- Goal test predicate (What indicates reaching the goal?)
- Cost function - Path cost - Sum of all actions costs along the path Solution: A path from Initial state to Goal state that satisfies the Goal-test
Measuring problem solving performance
Search cost (”offline”) - What does it cost to find the solution Execution cost (”online”) = Path cost Total cost = Search cost + Execution cost
Solving Problems by Search
Search algorithms
Frontier - candidate nodes for expansion
Explored set - set of nodes already visited
Search Strategies
A strategy is defined by picking the order of node expansion Evaluating strategies:
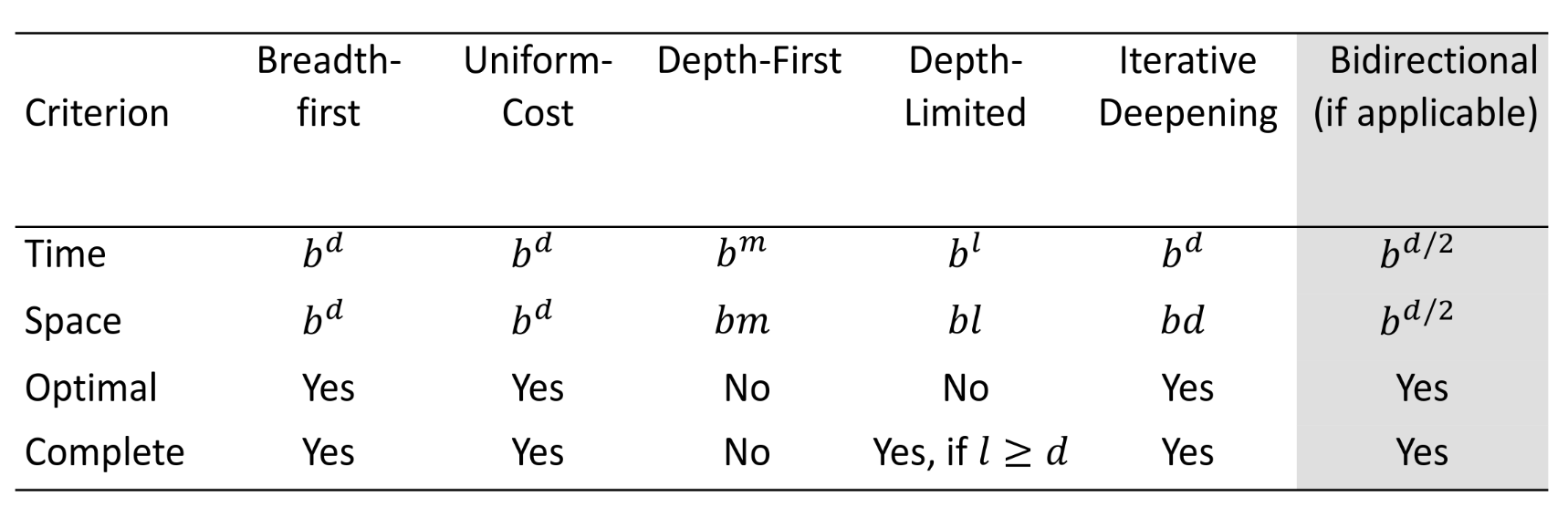
Completeness - Does it always find a solution is one exists?
Optimality - Does it always find the best (least-cost) solution?
Time Complexity - How long to find solution: number of nodes generated
Space Complexity - Maximum number of nodes in memory
-
Branching factor
Informed search
Use problem specific knowledge to guide the search
Usually more efficient Best first search - expand the most desirable unexpanded node - evaluation function Evaluation function - estimates “desirability” of each node
- Path-cost function g(n) (past experience)
- Cost from initial state to current state (search-node) n
- Heuristic function h(n) (future prediction)
- Estimated cost of the cheapest path from n to a goal state h(n)
- ℎ(n) is not larger than the real cost (admissible)
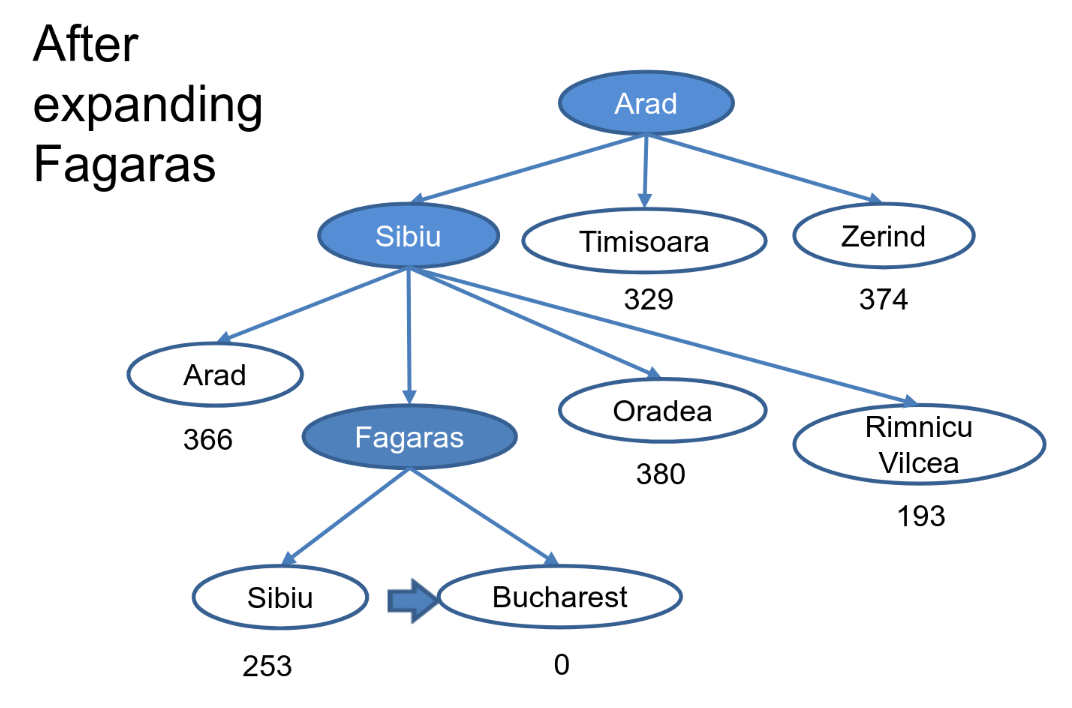
Greedy Search
-
Expands the node that appears to be closest to goal using h(n)
Complexity:
- Complete: no
- Time: b
- Space: b
- Optimal: No
- But still faster than uninformed searches
A * Search
Combine Greedy search with Uniform-Cost search
Evaluation function: 𝑓(𝑛) = 𝑔(𝑛) + ℎ(𝑛)
-
Complexity of A*
Uninformed search
Use only the information available in the problem definition
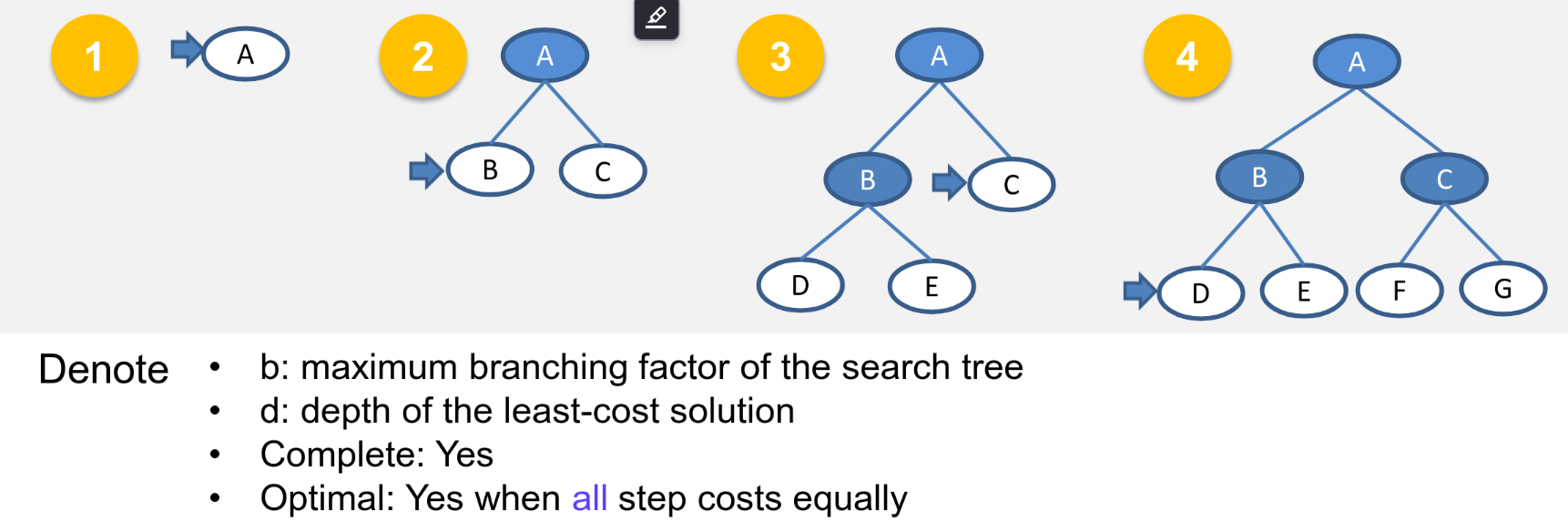
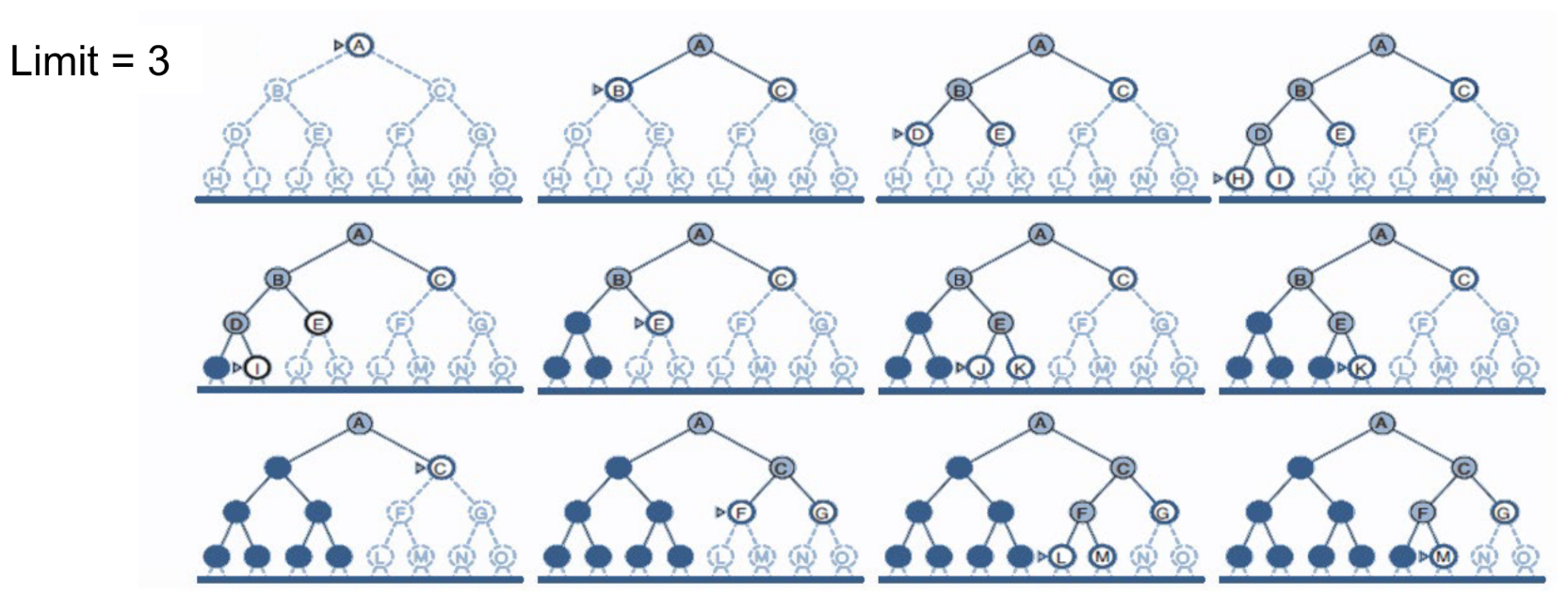
Breadth-First Search
-
Expand shallowest unexpanded node which can be implemented by a First-In-First-Out (FIFO) queue
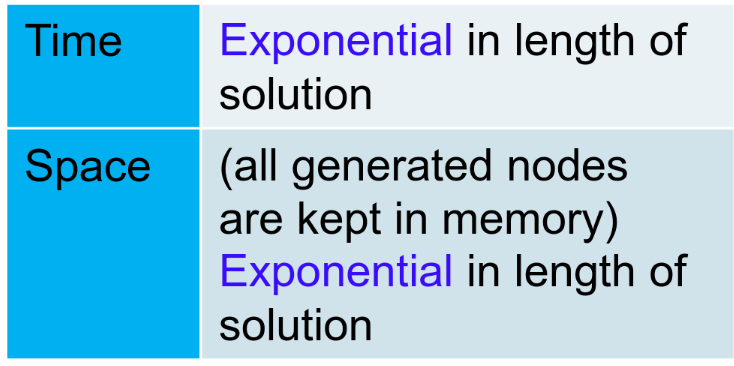
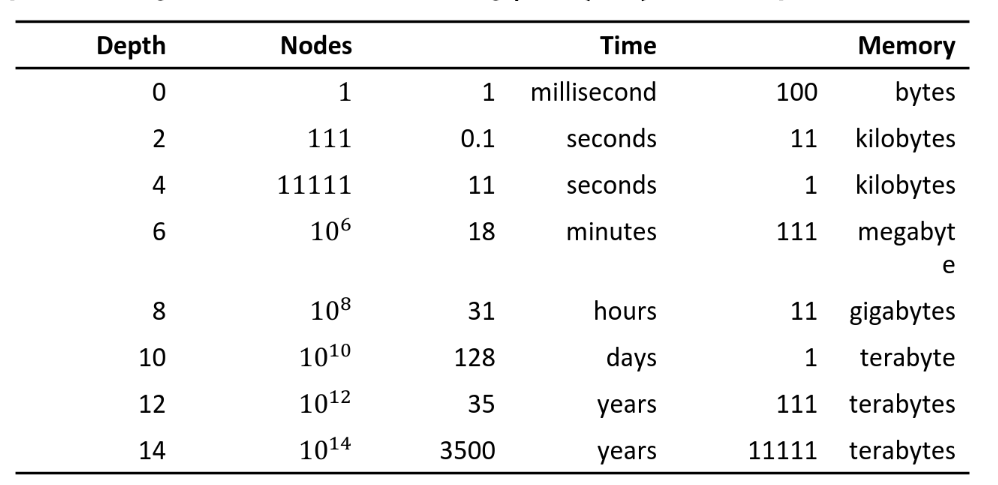
Complexity:
-
-
Space = all nodes kept in memory
-
Complete: Yes
-
Optimal: Yes when all step costs equally
-
Not suitable for deep searches
Denote:
-
b: maximum branching factor of the search tree
-
d: depth of least cost solution
Uniform-cost Search
-
Consider edge costs, expand unexpanded node with the least path cost
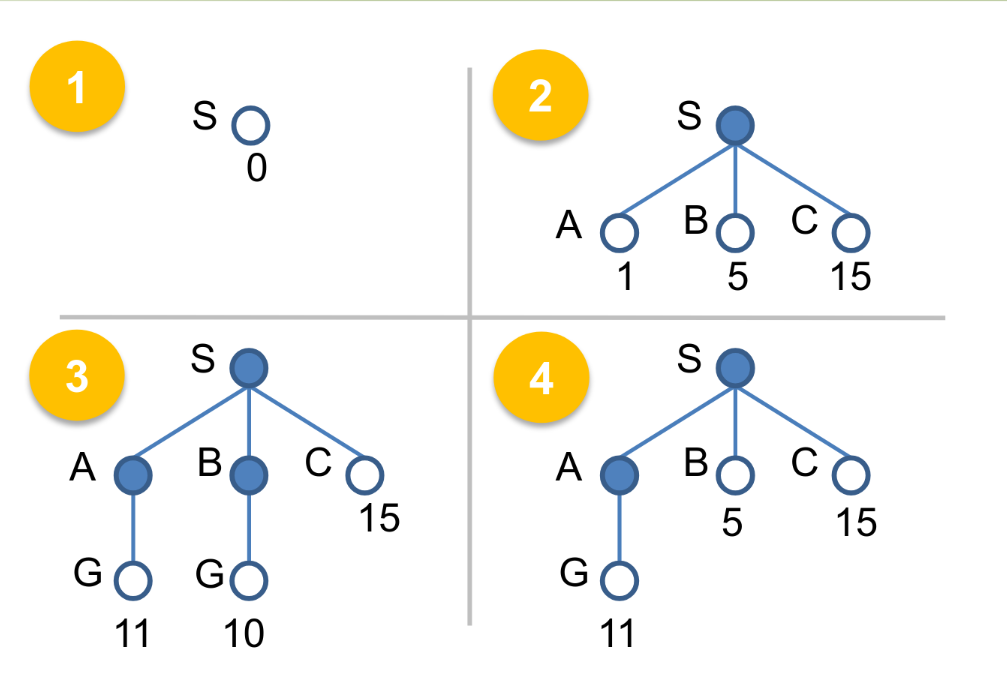
Goal test is only done when you expand to the node
Complexity:
- Complete = yes
- time = # of nodes with path cost g ⇐ cost of optimal solution
- space = # of nodes with path cost g ⇐ cost of optimal solution
- optimal = yes
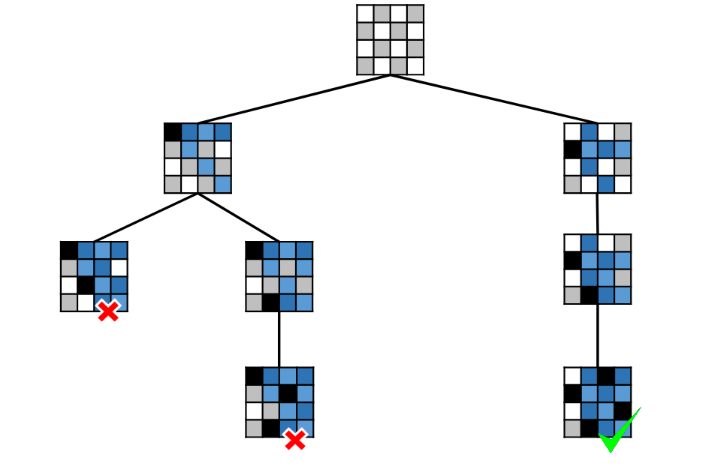
Depth-first Search
-
Expand deepest unexpanded node which can be implemented by a Last-In-First-Out (LIFO) stack, Backtrack only when no more expansion
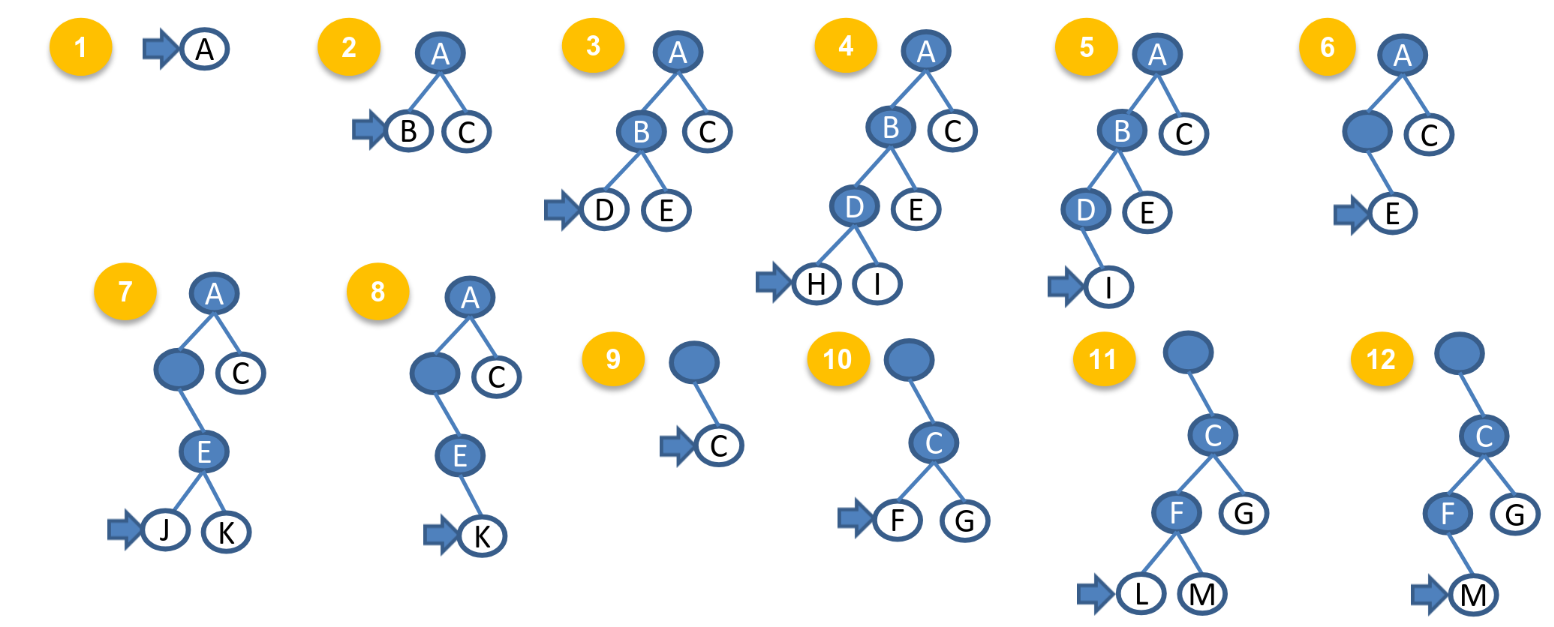
Complexity:
- Complete
- Infinite depth = no
- finite but loops = no
- otherwise = yes
- Time = b
- space = b x m
- optimal = no Denote:
- m = maximum depth of the state space
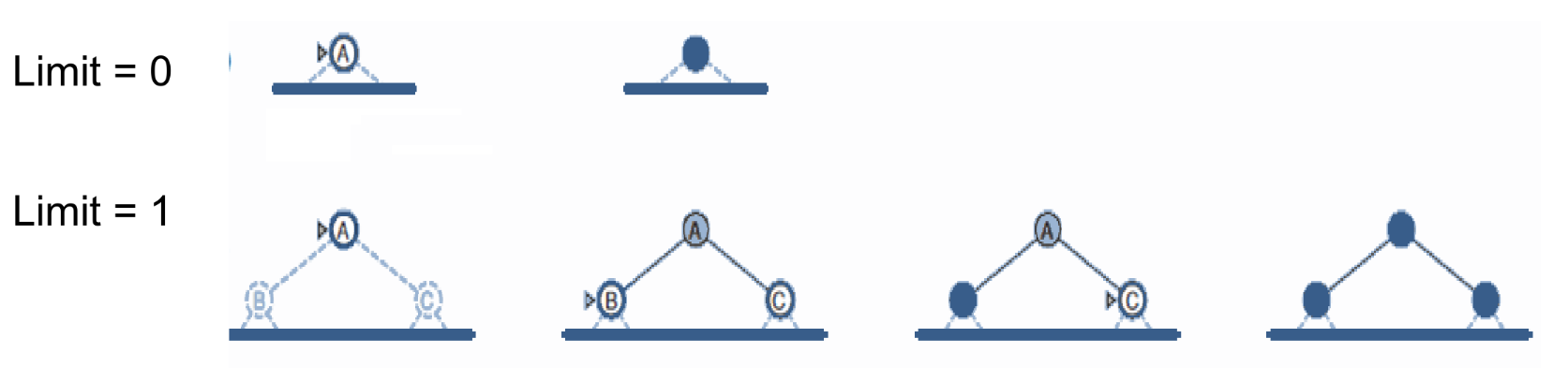
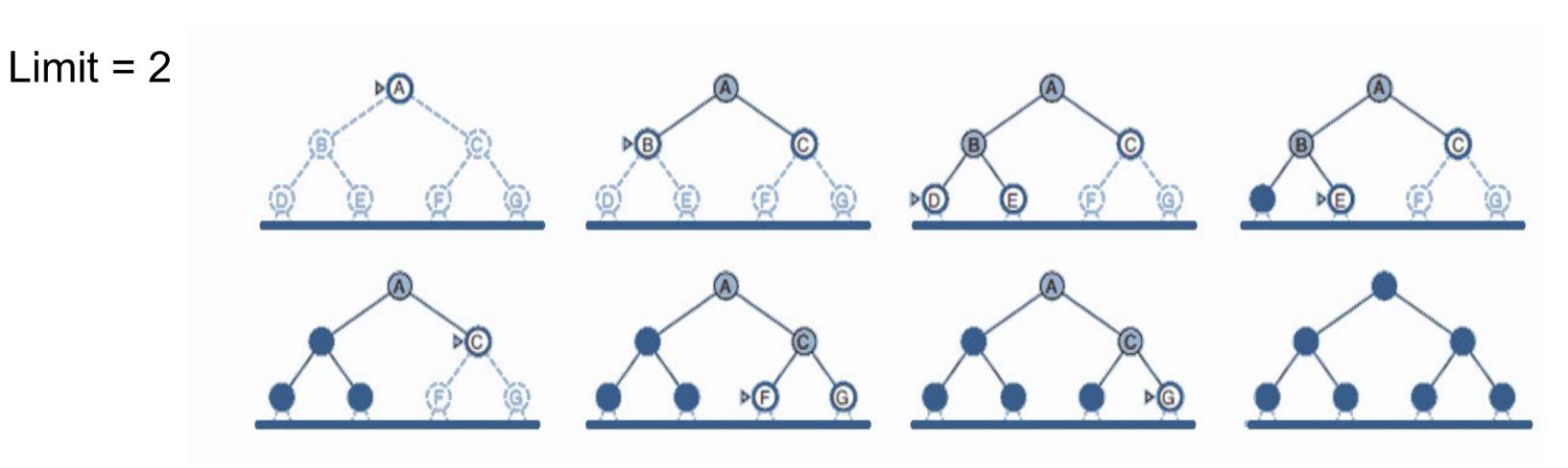
Depth Limiting: To avoid infinite searching, Depth-first search with a cutoff on the max depth I of a path Complexity:
-
Complete = yes if I ≥ d
-
Time = b
-
Space = b x I
-
Optimal = no Iterative deepening search:
-
Iteratively estimate the max depth / of DLS one-by-one
Summary
Constraint Satisfaction and Game playing
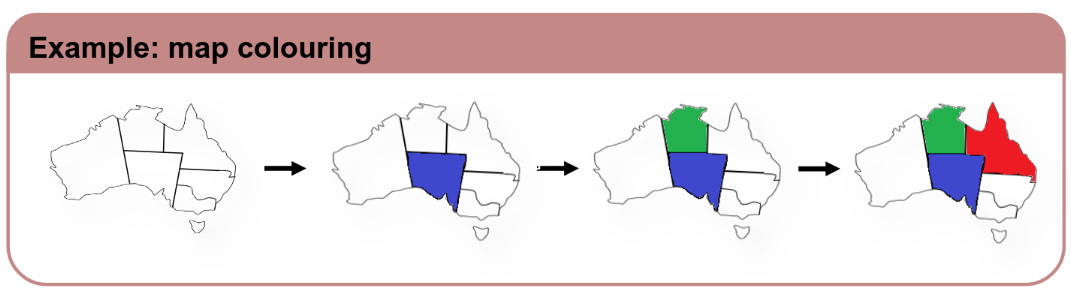
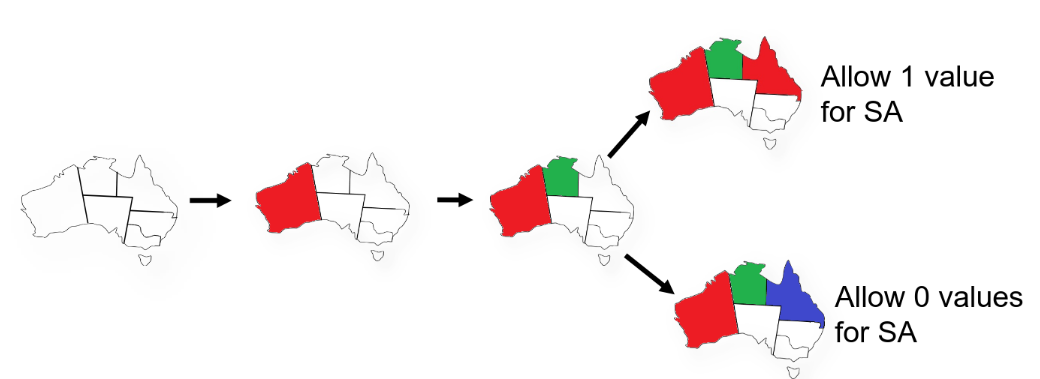
Constraint Satisfaction Problem (CSP)
Goal: discover some state that satisfies a given set of constraints
State: defined by variables with values from domain
Goal test: a set of constraints specifying allowable combinations of values for subsets of
variables
- Some Definition
- A state of the problem is defined by an assignment of values to some or all of the variables.
- An assignment that does not violate any constraints is called a consistent or legal assignment
- A solution to a CSP is an assignment with every variable given a value (complete) and the assignment satisfies all the constraints.
Backtracking search - Uninformed
Do not waste time searching when constraints have already been violated
- Before generating successors, check for constraint violations
- If yes, backtrack to something else
Heuristics for CSP
Implication of current variable assignments for other unassigned variables - Constraint Propagation
-
E.g.
Which variable to assign next - Most Constrained Variable
-
To reduce the branching factor on future choices by selecting the variable that in involved in the largest number of constraints on unassigned variables
What order of values to try for each variable - Least Constraining Value
-
Choose the value that leaves maximum flexibility for subsequent variable assignments
Min-Conflict Heuristic - CSP Method
- Given an initial assignment, selects a variable in the scope of a violated constraint and assigns it to the value that minimises the number of violated constraints
Game Playing
Why games?
Abstraction - Ideal representation of a real world problem Uncertainty - existence of hostile agents (players)
- Contingency problem - plans have to alter based on hostile agent actions Complexity - Games are abstract but not simple + Time limited
- Key terminology
- Initial state: initial board configuration and indication of who makes the first move
- Operators: legal moves
- Terminal test: determines when the game is over
- states where the game has ended: terminal states
- Utility function (payoff function): returns a numeric score to quantify the outcome of a game
Minimax Search Strategies
Maximise one’s own utility and minimise the opponent’s
- Assuming opponent does the same 3-step Process
- Generate the entire game tree down to terminal states
- Calculate utility for all states / process
- Select best move (Highest utility value) Perfect decisions? No time limit - Complete Search Tree Move chosen achieves best payoff assuming best play Imperfect decisions?
Time/space requirement → complete game tree is intractable → impractical to make perfect decisions Modification to minimax algorithm
- replace utility function with evaluation function (estimated desirability)
- partial tree search
- depth limit
- replace terminal test with cut-off test