Hello!
Read on to explore the circuitry planning and logistics in the early stages of making the project. Excalidraw Link
The Block Diagram
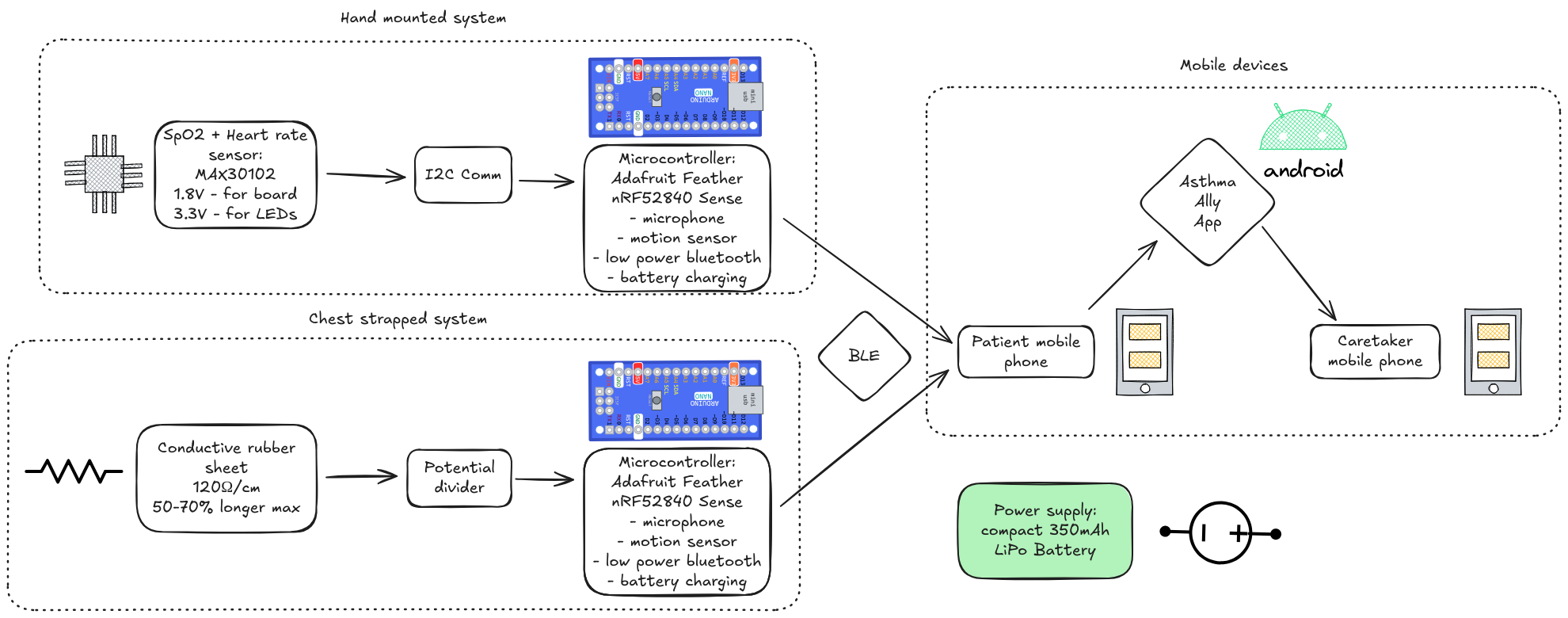
Power supply edited to be two 400mAh batteries
Details
Hand mounted system
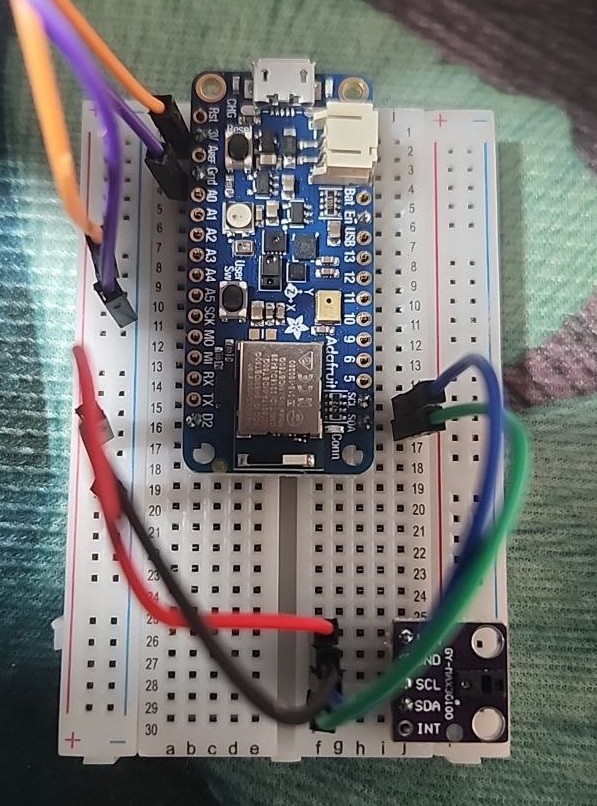
- I2C communication with MAX30102 - SpO2 & HeartRate
- GY-MAX30102 is used for easy implementation
- Integrated LED drivers allows a single 3.3V supply
- Investigate: Sensor on wrist or finger
- Adafruit Feather nRF52840 Sense communicates this data to user’s phone via Bluetooth Low Energy (BLE)
The Code
#include <Arduino.h>
#include <Wire.h> // I2C library
#include "Adafruit_TinyUSB.h"
#include <Adafruit_NeoPixel.h> // Neopixel LED library
#include <MAX30105.h> // MAX30105 or MAx30102 library
#include <spo2_algorithm.h> //SpO2 Sensor library
#define VBATPIN A6 // Battery voltage analog pin
#define NEOPIXELPIN 8 // Neopixel control pin
#define NUMPIXELS 1 // Number of neopixels
#define MAX_BRIGHTNESS 255 // for MAX30102
// Put variable declaration here
float VBat;
uint32_t irBuffer[100]; //infrared LED sensor data
uint32_t redBuffer[100]; //red LED sensor data
int32_t bufferLength = 100; //data length
int32_t spo2; //SPO2 value
int8_t validSPO2; //indicator to show if the SPO2 calculation is valid
int32_t heartRate; //heart rate value
int8_t validHeartRate; //indicator to show if the heart rate calculation is valid
// Put function declaration here
float getBattVoltage(int x);
void VBatIndicator();
void FillSensorBuffer();
// Initialize NeoPixel
Adafruit_NeoPixel pixel = Adafruit_NeoPixel(NUMPIXELS, NEOPIXELPIN, NEO_GRB + NEO_KHZ800);
//Initialise MAX30102 SpO2 Sensor
MAX30105 particleSensor;
void setup() {
// put your setup code here, to run once:
// Initialize NeoPixel
pixel.begin();
pixel.setBrightness(20); // Set brightness (0-255)
pixel.show(); // Initialize all pixels to 'off'
// Start Serial
Serial.begin(115200);
Serial.println("Outputting readings... NOW");
Wire.begin(); // Initialize I2C
// Initialize MAX30102
if (!particleSensor.begin(Wire, I2C_SPEED_FAST)) {
Serial.println("MAX30102 not found! Check wiring.");
while (1); // Halt if sensor not found
}
Serial.println(F("Attach sensor to finger with rubber band. Press any key to start conversion"));
while (Serial.available() == 0) ; //wait until user presses a key
Serial.read();
// Configure sensor for SpO2 monitoring
particleSensor.setup(60, 4, 2, 100, 411, 4096);
/*
Parameters:
LED brightness (0-255)
Sample averaging (1, 2, 4, 8, 16, 32)
LED mode (1 = Red, 2 = Red + IR)
Sample rate (50, 100, 200, 400, 800, 1000, 1600, 3200)
Pulse width (69, 118, 215, 411)
ADC range (2048, 4096, 8192, 16384)
*/
}
void loop() {
// put your main code here, to run repeatedly
// Sequence to indicate battery status
VBat = getBattVoltage(analogRead(VBATPIN));
VBatIndicator();
Serial.println("hello i'm running");
//read the first 100 samples, and determine the signal range
static bool bufferfill = false;
if (!bufferfill) {
FillSensorBuffer();
maxim_heart_rate_and_oxygen_saturation(irBuffer, bufferLength, redBuffer, &spo2, &validSPO2, &heartRate, &validHeartRate);
bufferfill = true;
}
//dumping the first 25 sets of samples in the memory and shift the last 75 sets of samples to the top
for (byte i = 25; i < 100; i++)
{
redBuffer[i - 25] = redBuffer[i];
irBuffer[i - 25] = irBuffer[i];
}
//take 25 sets of samples before calculating the heart rate.
for (byte i = 75; i < 100; i++)
{
while (particleSensor.available() == false) //do we have new data?
particleSensor.check(); //Check the sensor for new data
redBuffer[i] = particleSensor.getRed();
irBuffer[i] = particleSensor.getIR();
particleSensor.nextSample(); //We're finished with this sample so move to next sample
//send samples and calculation result to terminal program through UART
Serial.print(F("red="));
Serial.print(redBuffer[i], DEC);
Serial.print(F(", ir="));
Serial.print(irBuffer[i], DEC);
Serial.print(F(", HR="));
Serial.print(heartRate, DEC);
Serial.print(F(", HRvalid="));
Serial.print(validHeartRate, DEC);
Serial.print(F(", SPO2="));
Serial.print(spo2, DEC);
Serial.print(F(", SPO2Valid="));
Serial.println(validSPO2, DEC);
}
//After gathering 25 new samples recalculate HR and SP02
maxim_heart_rate_and_oxygen_saturation(irBuffer, bufferLength, redBuffer, &spo2, &validSPO2, &heartRate, &validHeartRate);
}
// put function definitions here
float getBattVoltage(int x) {
float voltage = (x * 2 * 3.6) / 1024.0;
return constrain(voltage, 0.0, 4.2); // LiPo max voltage is 4.2V
}
void VBatIndicator() {
if (VBat > 4.1) {
pixel.setPixelColor(0, pixel.Color(0, 255, 0)); // Green indicate full batt
}
else if (VBat < 3.4) {
pixel.setPixelColor(0, pixel.Color(255, 0, 0)); // Red indicate low batt
}
else {
pixel.setPixelColor(0, pixel.Color(0, 0, 255)); // Blue indicate otherwise
}
pixel.show(); // Call show() only once after setting the color
}
void FillSensorBuffer() {
//read the first 100 samples, and determine the signal range
Serial.println("Collecting samples...");
//finger detection
if (particleSensor.getIR() < 7000) {
Serial.println("No finger detected");
return;
}
for (byte i = 0 ; i < bufferLength ; i++)
{
while (particleSensor.available() == false) //do we have new data?
particleSensor.check(); //Check the sensor for new data
redBuffer[i] = particleSensor.getRed();
irBuffer[i] = particleSensor.getIR();
particleSensor.nextSample(); //We're finished with this sample so move to next sample
// Print progress
if (i % 10 == 0) { // Print every 10th sample
Serial.print("Progress: ");
Serial.print(i);
Serial.println("%");
}
}
Serial.println("Samples Collected!");
}Chest mounted system
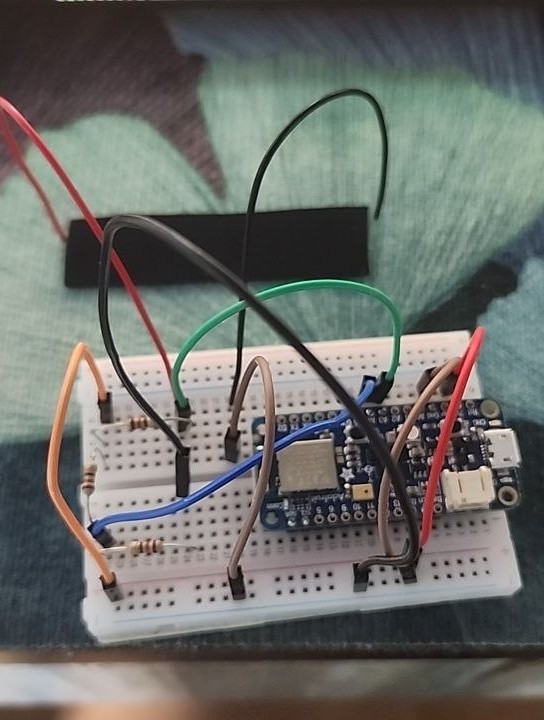
- Stretch of lower rib cage during breathing stretches Adafruit Conductive Rubber Sheet, increasing it’s resistance, creating a potential difference across a potential divider
- This P.D. is theoretically related to the stretch and thus related to the breath quantity
- This data will be calibrated to accurately represent the user’s breathing via calibration in app, normalising the P.D. to the fully exhaled data and fully inhaled data
- An CMA-4544PF-W Electret Microphone together with a MAX4466 Microphone Amplifier is attached to a stethoscope to analyse internal breathing sounds as well, sending amplitude and frequency data back to the Adafruit Feather nRF52840 Sense for analysis. Primarily trying to catch the high pitch sound of Wheezing. (Latest addition!)
- The Adafruit Feather nRF52840 Sense reads this data and sends this data together with sound and motion data from its inbuilt sound sensor and accelerometer to the user’s phone via Bluetooth Low Energy (BLE), UART communication protocol
The Code
#include <Arduino.h>
#include <Adafruit_NeoPixel.h> // NeoPixel LED library
#include "Adafruit_TinyUSB.h"
#include <bluefruit.h>
#include <PDM.h>
#include <arduinoFFT.h>
#include <Adafruit_LSM6DS33.h>
#define VBATPIN A6 // Battery voltage analog pin
#define NEOPIXELPIN 8 // Neopixel control pin
#define NUMPIXELS 1 // Number of neopixels
#define FFTSAMPLES 256 // Fast Fourier Transform sample collection
#define FFTSAMPLING_FREQ 16000
#define WHEATBRIDGEPIN_A A3
#define WHEATBRIDGEPIN_B A4
// Put variable declaration here
float VBat; // Voltage of battery
int32_t mic;
float dominantFreq;
extern PDMClass PDM;
short PDMsampleBuffer[256]; // buffer to read PDMsamples into, each sample is 16-bits
volatile int PDMsamplesRead; // number of PDMsamples read
double vReal[FFTSAMPLES];
double vImag[FFTSAMPLES];
Adafruit_LSM6DS33 lsm6ds33;
const float ALPHA = 0.95; // Low-pass filter coefficient (Higher values (closer to 1) mean slower gravity filtering but better noise reduction)
float gravityX = 0, gravityY = 0, gravityZ = 0; // Filtered gravity components
float lastAccelX = 0, lastAccelY = 0, lastAccelZ = 0; // Previous acceleration readings
float deltaX = 0, deltaY = 0, deltaZ = 0; // Change in acceleration
/* Create FFT object */
ArduinoFFT<double> FFT = ArduinoFFT<double>(vReal, vImag, FFTSAMPLES, FFTSAMPLING_FREQ);
// BLE Service for Environmental Sensing
BLEService envService("181A"); // Environmental Sensing BLE service
BLECharacteristic soundChar("2A71", BLERead | BLENotify); // Sound level
BLECharacteristic freqChar("2A76", BLERead | BLENotify); // Frequency
BLECharacteristic accelChar("2A73", BLERead | BLENotify); // Acceleration
BLECharacteristic stretchChar("2A77", BLERead | BLENotify); // Custom for stretch
BLEUart bleuart;
// Put your function declarations here
float getBattVoltage(int x);
void VBatIndicator();
float computeFFT();
float getFilteredAcceleration();
float getPotDiffWheat();
void setupBLE();
int32_t getPDMwave(int32_t samples);
void onPDMdata();
// Initialize NeoPixel
Adafruit_NeoPixel pixel = Adafruit_NeoPixel(NUMPIXELS, NEOPIXELPIN, NEO_GRB + NEO_KHZ800);
void setup() {
// Put your code here to run once at setup
// Initialize NeoPixel
pixel.begin();
pixel.setBrightness(2); // Set brightness (0-255)
// Quick test of NeoPixel
pixel.setPixelColor(0, pixel.Color(255, 0, 0)); // Red
pixel.show();
delay(500);
pixel.setPixelColor(0, pixel.Color(0, 255, 0)); // Green
pixel.show();
delay(500);
pixel.setPixelColor(0, pixel.Color(0, 0, 255)); // Blue
pixel.show();
delay(500);
pixel.setPixelColor(0, pixel.Color(0, 0, 0)); // Blue
pixel.show();
delay(500);
// Start Serial
Serial.begin(115200);
Serial.println("Sensors outputting information... NOW!");
// Setup BLE
setupBLE();
Serial.println("Advertising BLE...");
// Start Accelerometer
lsm6ds33.begin_I2C();
// configure accelerometer for cough detection
lsm6ds33.setAccelRange(LSM6DS_ACCEL_RANGE_4_G);
lsm6ds33.setAccelDataRate(LSM6DS_RATE_104_HZ);
// Initialize gravity filter with first reading
sensors_event_t accel;
sensors_event_t gyro;
sensors_event_t temp;
lsm6ds33.getEvent(&accel, &gyro, &temp);
gravityX = accel.acceleration.x;
gravityY = accel.acceleration.y;
gravityZ = accel.acceleration.z;
// Start sound sensor
PDM.onReceive(onPDMdata);
PDM.begin(1, 16000);
}
void loop() {
// Put your code here to loop
// indicate battery level
VBat = getBattVoltage(analogRead(VBATPIN));
VBatIndicator();
// Get sound sensor data
PDMsamplesRead = 0;
mic = getPDMwave(FFTSAMPLES);
// Copy samples to FFT arrays only after we have enough data
for (int i = 0; i < FFTSAMPLES; i++) {
vReal[i] = (double)PDMsampleBuffer[i];
vImag[i] = 0.0;
}
// Compute FFT and get dominant frequency
dominantFreq = computeFFT();
// Get Jerk movement data
float acceleration = getFilteredAcceleration();
// Compute potential diff across wheat bridge
float PotDiff = getPotDiffWheat();
// Print data
Serial.print("RMS amplitude: ");
Serial.print(mic);
Serial.print(" Dominant frequency: ");
Serial.print(dominantFreq);
Serial.print(" Hz Jerking: ");
Serial.print(acceleration);
Serial.print(" m/s² Stretch Coeff (P.D.): ");
Serial.print(PotDiff);
Serial.println("V");
// Optional: Only print when significant movement detected
if (acceleration > 2.0) { // Threshold for significant movement
Serial.println("*** Significant movement detected! ***");
}
// Send data over BLE
if (Bluefruit.connected()) {
// FOR ENVIRO SERVICE
// Convert float values to byte arrays for BLE transmission
uint8_t soundData[4], freqData[4], accelData[4], stretchData[4];
memcpy(soundData, &mic, 4);
memcpy(freqData, &dominantFreq, 4);
memcpy(accelData, &acceleration, 4);
memcpy(stretchData, &PotDiff, 4);
// Send notifications
soundChar.notify(soundData, 4);
freqChar.notify(freqData, 4);
accelChar.notify(accelData, 4);
stretchChar.notify(stretchData, 4);
// FOR UART
// Format data string exactly like Serial Monitor
char uartData[150]; // Increased buffer size to prevent overflow
memset(uartData, 0, sizeof(uartData)); // Clear buffer
// Split the data into multiple transmissions to ensure reliable transfer
sprintf(uartData, "RMS amplitude: %d\n", (int)(mic));
bleuart.write(uartData, strlen(uartData));
sprintf(uartData, "Dominant frequency: %.2f Hz\n", dominantFreq);
bleuart.write(uartData, strlen(uartData));
sprintf(uartData, "Jerking: %.2f m/s²\n", acceleration);
bleuart.write(uartData, strlen(uartData));
sprintf(uartData, "Stretch Coeff (P.D.): %.3f V\n", PotDiff);
bleuart.write(uartData, strlen(uartData));
// Send movement alert if needed
if (acceleration > 2.0) {
bleuart.write("*** Significant movement detected! ***\n", 39);
}
// Add a separator line
bleuart.write("----------------------------------------\n", 41);
char plotterData[100];
sprintf(plotterData, "%d,%d,%d,%d\n",
(int)(mic), // Sound level
(int)(dominantFreq), // Frequency
(int)(acceleration*100), // Acceleration (scaled up for visibility)
(int)(PotDiff*100)); // Stretch (scaled up for visibility)
bleuart.write(plotterData, strlen(plotterData));
}
delay(100);
}
// Put your function definitions here
// calculate RMS amplitude from samples
int32_t getPDMwave(int32_t samples) {
long sum = 0;
int count = 0;
const int16_t AMPLITUDE_THRESHOLD = 10; // Adjust this threshold based on testing to eliminate noise
int16_t max_amplitude = 0;
int16_t min_amplitude = 0;
while (samples > 0) {
if (!PDMsamplesRead) {
yield();
continue;
}
for (int i = 0; i < PDMsamplesRead; i++) {
// Only process samples above noise threshold
if (abs(PDMsampleBuffer[i]) > AMPLITUDE_THRESHOLD) {
// Track min/max for peak-to-peak calculation
if (PDMsampleBuffer[i] > max_amplitude) max_amplitude = PDMsampleBuffer[i];
if (PDMsampleBuffer[i] < min_amplitude) min_amplitude = PDMsampleBuffer[i];
// Square each sample and add to sum for RMS
sum += (long)PDMsampleBuffer[i] * PDMsampleBuffer[i];
count++;
}
samples--;
}
PDMsamplesRead = 0;
}
// Only return RMS if we have significant signal
int32_t peak_to_peak = max_amplitude - min_amplitude;
if (peak_to_peak > AMPLITUDE_THRESHOLD * 2) {
return (count > 0) ? sqrt(sum / count) : 0;
}
return 0; // Return 0 if signal is too weak
}
void onPDMdata() { // initialise PDM data reading
// query the number of bytes available
int bytesAvailable = PDM.available();
// read into the sample buffer
PDM.read(PDMsampleBuffer, bytesAvailable);
// 16-bit, 2 bytes per sample
PDMsamplesRead = bytesAvailable / 2;
}
float getBattVoltage(int x) {
float voltage = (x * 2 * 3.6) / 1024.0;
return constrain(voltage, 0.0, 4.2); // LiPo max voltage is 4.2V
}
void VBatIndicator() { // alter neopixel colour to show battery status
if (VBat > 4.1) {
pixel.setPixelColor(0, pixel.Color(0, 255, 0)); // Green indicate full batt
}
else if (VBat < 3.4) {
pixel.setPixelColor(0, pixel.Color(255, 0, 0)); // Red indicate low batt
}
else {
pixel.setPixelColor(0, pixel.Color(0, 0, 255)); // Blue indicate otherwise
}
pixel.show(); // Call show() only once after setting the color
}
float computeFFT() { // compute frequency function
// Compute FFT
FFT.windowing(FFT_WIN_TYP_HAMMING, FFT_FORWARD);
FFT.compute(FFT_FORWARD);
FFT.complexToMagnitude();
// Calculate dominant frequency
double peak = 0;
int peakIndex = 0;
const double NOISE_THRESHOLD = 600; // Adjust this value based on testing to eliminate noise
for (int i = 1; i < (FFTSAMPLES/2); i++) {
if (vReal[i] > peak) {
peak = vReal[i];
peakIndex = i;
}
}
// Print dominant frequency
if (peak > NOISE_THRESHOLD) {
float dominantFreq = (peakIndex * 1.0 * FFTSAMPLING_FREQ) / FFTSAMPLES;
return dominantFreq;
}
else {
return 0.0; // Return 0 if no significant peak found
}
}
float getFilteredAcceleration() { // Filter out gravity from accelerometer and obtain aggregated acceleration across all 3 axes
sensors_event_t accel;
sensors_event_t gyro;
sensors_event_t temp;
lsm6ds33.getEvent(&accel, &gyro, &temp);
// Low-pass filter to extract gravity components for all axes
gravityX = ALPHA * gravityX + (1.0 - ALPHA) * accel.acceleration.x;
gravityY = ALPHA * gravityY + (1.0 - ALPHA) * accel.acceleration.y;
gravityZ = ALPHA * gravityZ + (1.0 - ALPHA) * accel.acceleration.z;
// High-pass filter to get dynamic acceleration
float dynamicAccelX = accel.acceleration.x - gravityX;
float dynamicAccelY = accel.acceleration.y - gravityY;
float dynamicAccelZ = accel.acceleration.z - gravityZ;
// Calculate total magnitude of acceleration change vector
float totalDelta = sqrt(
pow(dynamicAccelX - lastAccelX, 2) +
pow(dynamicAccelY - lastAccelY, 2) +
pow(dynamicAccelZ - lastAccelZ, 2)
);
// Update last readings
lastAccelX = dynamicAccelX;
lastAccelY = dynamicAccelY;
lastAccelZ = dynamicAccelZ;
return totalDelta; // Return magnitude of acceleration change
}
float getPotDiffWheat() { // calculate the potential difference across two point on wheatstone bridge
const int SAMPLES = 10; // Number of samples to average
float sumA = 0;
float sumB = 0;
// Take multiple readings
for(int i = 0; i < SAMPLES; i++) {
sumA += analogRead(WHEATBRIDGEPIN_A);
sumB += analogRead(WHEATBRIDGEPIN_B);
delay(1); // Short delay between readings
}
// Calculate average and convert to voltage
float voltageA = (sumA / SAMPLES * 3.3) / 1024.0;
float voltageB = (sumB / SAMPLES * 3.3) / 1024.0;
return fabsf(voltageA - voltageB);
}
void setupBLE() {
// Initialize Bluefruit with maximum connections as Peripheral
Bluefruit.begin(1, 0);
Bluefruit.setName("AsthmaAlly_Chest");
// Configure and Start UART Service
bleuart.begin();
// Configure and Start Environmental Service
envService.begin();
// Configure the characteristics for ENVIRO SERVICE
soundChar.setProperties(CHR_PROPS_READ | CHR_PROPS_NOTIFY);
soundChar.setPermission(SECMODE_OPEN, SECMODE_NO_ACCESS);
soundChar.setFixedLen(4);
soundChar.begin();
freqChar.setProperties(CHR_PROPS_READ | CHR_PROPS_NOTIFY);
freqChar.setPermission(SECMODE_OPEN, SECMODE_NO_ACCESS);
freqChar.setFixedLen(4);
freqChar.begin();
accelChar.setProperties(CHR_PROPS_READ | CHR_PROPS_NOTIFY);
accelChar.setPermission(SECMODE_OPEN, SECMODE_NO_ACCESS);
accelChar.setFixedLen(4);
accelChar.begin();
stretchChar.setProperties(CHR_PROPS_READ | CHR_PROPS_NOTIFY);
stretchChar.setPermission(SECMODE_OPEN, SECMODE_NO_ACCESS);
stretchChar.setFixedLen(4);
stretchChar.begin();
// Start advertising
Bluefruit.Advertising.addFlags(BLE_GAP_ADV_FLAGS_LE_ONLY_GENERAL_DISC_MODE);
Bluefruit.Advertising.addService(bleuart); // Add UART service advertising
Bluefruit.Advertising.addService(envService); // ENVIRO service advertising
Bluefruit.Advertising.addName();
Bluefruit.Advertising.restartOnDisconnect(true);
Bluefruit.Advertising.setInterval(32, 244); // in unit of 0.625 ms
Bluefruit.Advertising.setFastTimeout(30); // number of seconds in fast mode
Bluefruit.Advertising.start(0); // 0 = Don't stop advertising after n seconds
}Mobile devices
- Our app takes in these data (SpO2, heart rate, sound, motion, breath) to deduce signs of imminent asthma attack
- Wheezing (Sound Characteristics)
- Coughing (Sound + Jerk Motion)
- Low blood oxygen (SpO2)
- Elevated heart rate
- The app will also analyse location data, which can eliminate false alarms
- E.g. GPS movement indicates running → Heart rate sensor data dropped in significance
Circuit Schematics
Breadboard Prototyping
 Check out the data output @ Machine Learning & Data Processing
Check out the data output @ Machine Learning & Data Processing